



活動内容
NHK学生ロボコン2024
1.1 ルール
本年度の競技課題は、稲作をテーマとした一連のタスクを、各チームが2台のロボットを用いて行うものでした。
フィールドは3つのエリアに分かれており、それぞれのエリアに対応するタスクが設定されています。タスクの内容は、エリア1が苗の形をしたオブジェクトを運ぶ「プラント(田植え)」、エリア2が米粒に見立てたボールを投げる「ハーベスト(米の収穫)」、エリア3がそのボールを色によって仕分け、サイロと呼ばれる籠に入れる「ストア(米の選別と貯蔵)」でした。
試合に勝つ方法としては、ストアのタスクにおいて、定められた条件を満たすようなボールの入れ方をして「Mùa Vàng」を達成する方法と、どちらのチームも「Mùa Vàng」を達成していない場合に、試合終了時の3つのタスクの合計得点で上回る方法があります。
2台あるロボットのうち、ロボット1は手動機、ロボット2は一切の操縦ができない自動機です。一番得点の高いストアのタスクは自動機のロボット2しか行えないため、ロボット2がいかにして自動でボールを選別してサイロまで運ぶか、それを手動機であるロボット1がいかにしてサポートするか、が競技の鍵となりました。
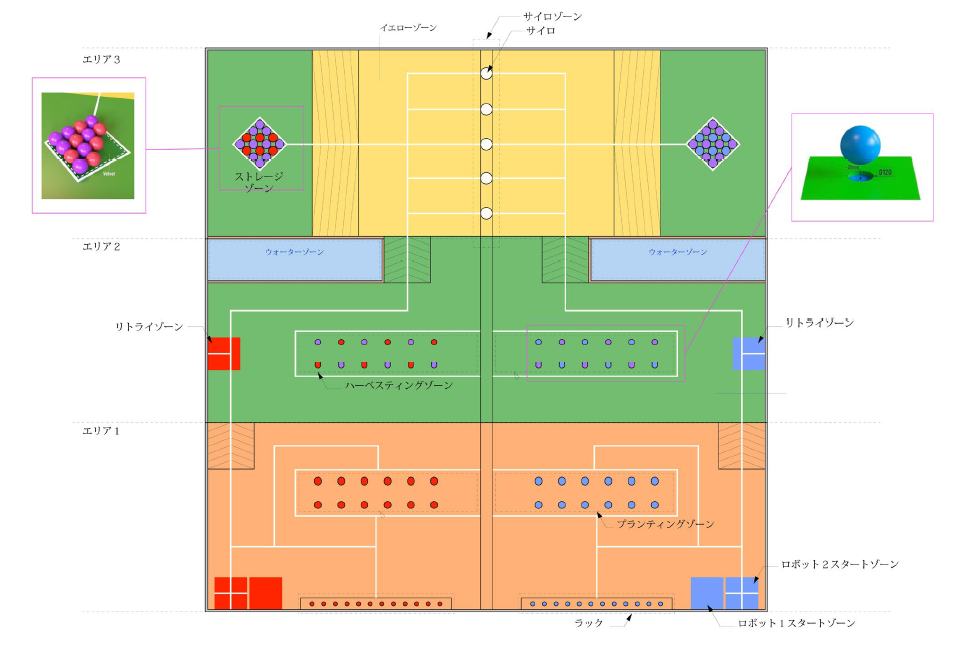
(フィールド図)
1.2開発したロボット
NHK学生ロボコン2024出場にあたって、製作したロボットについて、技術紹介PVを投稿しておりますので、是非ご覧ください。
YouTube : ロボット技術紹介PV
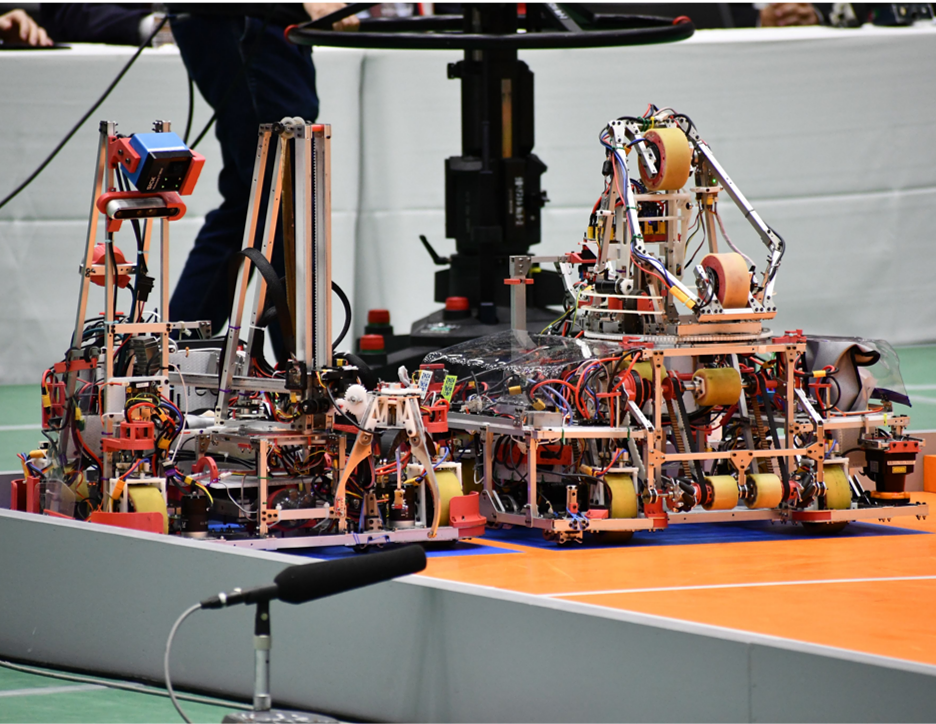
(出場したロボット)
要素技術の説明
【両機共通】
1. 移動機構
速さを追求するため、各車輪が独立してステアリングすることで全ての方向に最大の加速度を出せるActive Caster 型の移動機構を用いています。両機ともに駆動にはブラシレスモーターを用いており、軽量かつ高出力な移動機構を実現しています。
2. 経路生成・自己位置補正
R1・R2 それぞれの状況に合致した、最適な経路をたどるアルゴリズムを開発しました。また、LiDARを用いて壁の位置を特定し、自己位置推定の補正を行っています。これらの技術により、R1 は半自動、R2 は完全自動での精度・速度ともに優れた移動を実現しました。
【R1】
1. プラント用機構
「プラント」タスクで用いられました。4 本の苗オブジェクトを一度に把持することができます。
2. ハーベスト用機構
「ハーベスト」タスクで用いられました。回収した後すぐに投擲することをコンセプトに作成しました。ボールにバックスピンをかけることで狙った位置にボールを静止させることができます。
3. 段差越え機構
エリア間にある段差を乗り越えられるようにすることで、「プラント」が行われるエリア1 から「ハーベスト」が行われるエリア2 への素早い移動を可能にしました。
【R2】
1. ストア用機構
狙ったボールのみを正確に掴み、一度掴んだボールは離さないよう改良を重ねたハンド、制御性のいいアーム部分を組み合わせて、信頼度の高い機構設計を心がけました。
2. 壁キック機構
サイロゾーン側面のフィールドの壁を蹴ることでロボットの急減速・急発進を可能にしました。大会では我々のチームのみが搭載しており、サイロにボールを入れるスピードで他のチームを上回れた理由の1 つです。
3. 認識
深度カメラの情報から掴むべきボールの位置を認識し、カラーカメラの情報からボールの種類を判別しました。深層学習モデルを用いてサイロ内の状況を認識しています。
1.3大会結果
準優勝
予選第1試合: vs 東京工業大学 勝利 520 – 360
予選第2試合: vs 日本工業大学 勝利 420 – 70
準々決勝: vs 東北大学 勝利 Mùa Vàng 達成 (1分05秒)
準決勝: vs 東京農工大学 勝利 470 – 400
決勝: vs 豊橋技術科学大学 敗北 400 – 500
東京大学RoboTechは、事前に行われたビデオ審査の結果、シードチームとして大会に出場し、予選リーグではBグループに配置されました。予選の2試合では、Mùa Vàng 達成はならなかったものの、2試合とも得点によって勝利し、予選順位2位で決勝トーナメントに駒を進めました。ただ、第1試合には両ロボットともにリトライがあり、第2試合もロボット2の不調で一度リトライを行う
など、試合内容としては不安の残るものでした。
決勝トーナメントでは、準々決勝で本来の持ち味である素早い動作をほぼ完璧に行い、大会を通して全チーム最速タイムとなる1分05秒でのMùa Vàng 達成に成功して勝利しました。次の準決勝では、前年度の大会で敗退した相手である東京農工大学に対し、ロボット2のリトライがあるなど苦しみながらも、得点で勝利し雪辱を果たしました。最後の決勝では、永遠のライバルである豊橋技術科学大学に対し、ロボット2のスピードの優位性を生かして開始から30秒間はリードしていたものの、ロボット2のリトライが必要となり、その間に逆転され、最終的に得点差で敗北してしまいました。
本大会で得た経験を糧に、来年度の学生ロボコンでの優勝を目指し、日々活動に精進してまいります。
学生の声
私は中高運動部で、ものづくりは学校の授業でやったことしかありませんでした。大学に入ってものづくりを本気でやってみたいと思い、このプロジェクトに参加しました。最初はものづくりの楽しさで活動していましたが、それだけでなく、みなで同じ目標に進んでいく楽しさを感じることができました。
プロジェクトではロボットの機構設計を担当しました。参加した当初はコンピュータを使った設計・金属加工はおろか、簡単な電子工作もしたことがありませんでした。このプロジェクトに入り、緻密に組まれた教育カリキュラムをこなすことで、ロボコンで日本全国と戦えるだけの技術を身に着けることができました。
このプロジェクトではチームマネジメントの経験もすることができました。数十人ものいろいろな専門・バックグラウンドを持った仲間たちと一緒に「ロボコン優勝」という一つの大きな目標を目指す経験は、今後の人生の中でも得難い経験であったと振り返っております。
この経験を活かし、今では機械情報工学科に進学しロボットの研究を行っており、社会に出てからもものづくりに携われる職に就きたいと考えております。ぜひ多くの後輩にこのプロジェクトに参加していただき、ものづくりの楽しさ、ひいてはロボコンの楽しさを体感してもらいたいです。

(出場したロボットと開発メンバー)